
The Horizon Europe-funded project “ENVRINNOV- ENVironment Research infrastructures Innovation Roadmap” is working towards the development of an Innovation Roadmap for the ENVRI community. This will include proposed mechanisms for collaboration between all innovation-performing stakeholders in the ENVRI ecosystem (RIs, RPOs, and Industry) for the development of new technologies and services. To ensure that these mechanisms are fit for the needs of ENVRIs, they have been tested during the project by five RPOs from different subdomains (Atmosphere, Biosphere, Geosphere) through four small-scale pilot cases.
Task 2.1. Pilot Case: “drone-sensor system to detect and quantify methane emissions” (Led by CEA and the Cyprus Institute)
Methane is a powerful greenhouse gas. Abating methane emissions in a comprehensive monitoring, reporting and verification framework is a key contribution to climate change mitigation. Several international initiatives are now active to implement such mitigation strategies and science-based advanced technologies are needed to support these efforts. Notably, several companies expressed interest in seeking novel methane emission quantification techniques that use state of the art measurements and mobile platforms.
Development of the technology: UAV-GHG
A multi-rotor Unmanned Aerial Vehicle (UAV) equipped with Ground Control Station (GCS) software for unmanned operation has been developed. Real-time wireless communication is employed to stream sensor data live to the GCS and online via the cloud, enabling continuous monitoring and data access during flight operations.
Instruments for the measurement of CH4, meteorological and UAV state parameters are installed aboard the multi-rotor. Measurements of CH4 are made using the cavity-based spectroscopy ABB LGR-ICOS™ UAV Analyzer, GLA133-GGA Model sampling air at a rate of 10 Hz, via a 0.6 m length PFA tube above the plane of the UAV rotors, extensively tested at ICOS-ATC following ICOS protocols augmented with specific tests for flight performance. The precision of the CH4 measurement is 0.1 ppb. Necessary parameters for emissions estimation affecting the atmospheric dilution including temperature (T), pressure (P) and relative humidity (RH), are measured on-board. The 3D wind speed was derived from a LI-550P TriSonica™ Mini anemometer mounted on a 0.6 m carbon fiber tube above the plane of the UAV rotors at 10 Hz. LIDAR (anti-collision system) and geo-referenced HD video for better visual location of CH4 were also used to address operational challenges. The AIRMAR 150WX provides ground-based 2-D wind measurements.
For the calculation of emission fluxes, we use a Gaussian plume dispersion model. Methane flux from a single-point source can be quantified by inverting equation (1), which models the downwind enhancement over background, the emission flux rate, the dispersion rate and the wind speed.

where Q is the emission flux, is the perpendicular wind speed, H is the height of the emission plume source above the ground and 𝜎𝑦 and 𝜎𝑧 are Gaussian dispersion parameters of the plume in the y and z directions, respectively.
Validation and exploitation
We participated in the EDF/TADI (TotalEnergies Anomaly Detection Initiatives)-2024 controlled release experiment campaign, conducted from September 16 to 20, 2024. The campaign’s primary objective was to validate our technology and methodology for accurately estimating both the location and rates of GHG emissions. Over the course of the campaign, 40 controlled releases were conducted, each lasting 45 minutes and spanning a wide range of emission magnitudes. Near-surface mobile concentration measurements were made with the ABB LGR-ICOS™ UAV analyzer.
Following the validation of the technology and methodology, mobile and UAV measurements were carried out at the Kotsiatis landfill and a cattle farm in Orounda, with the aim of quantifying their CH₄ emission rates, see Figure 1.
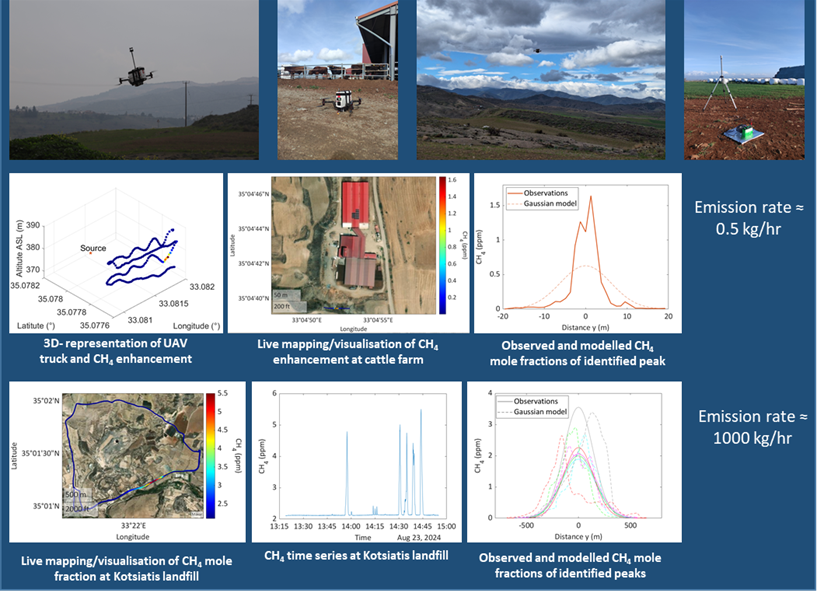
Figure 1. UAV and mobile measurements of CH4 at a cattle farm (Orounda, middle) and at Kotsiatis landfill (bottom).
Task 2.2. Pilot Case: “Development of multi-function electronics to control in-situ instruments for trace species detection“(Led by KIT)
Baseline situation
State-of-the-art instruments for accurate atmospheric trace species detection require a highly sophisticated electronic system that i) controls the instrument, including the environmental conditions (such as temperature and pressure) of installed sub-components and ii) records the complete set of house-keeping data that are required to continuously and fully reconstruct the actual instrument’s operation condition and thus to infer highly accurate quality-assured final (FAIR) data. Commercial instruments often lack in both features: first, they are usually not designed for the operation in harsh field environments or moving platforms (where more parameters have to be monitored and controlled), amongst others, as the manufactures don’t know all operation cases and can’t mimic them in their test centers, and secondly, house-keeping data are often insufficient for data analysis, as not measured and/or not recorded as raw data.
Joint industry – IAGOS infrastructure development of multi-function control electronics
Objective of this pilot study has been to apply, assess and finally optimize a concept called “Tech-Boost innovation pipeline”. Tech-Boost follows three phases:
In P-1 (the “definition phase”), a) a technological or observational gap is identified and b) the requirements or specifications, resp., are defined by the infrastructure to address this gap. Here, the gap is the lack of a small, versatile and inexpensive multi-function control electronics. Scientists (operating instruments onboard IAGOS passenger aircraft) have defined the functionality and features of such electronics as well as all physical parameters (e.g. voltages, temperatures, including their accuracy and detection speed) that shall be measured, controlled and recorded in order to allow the provision of FAIR final IAGOS data (incl. all metadata).
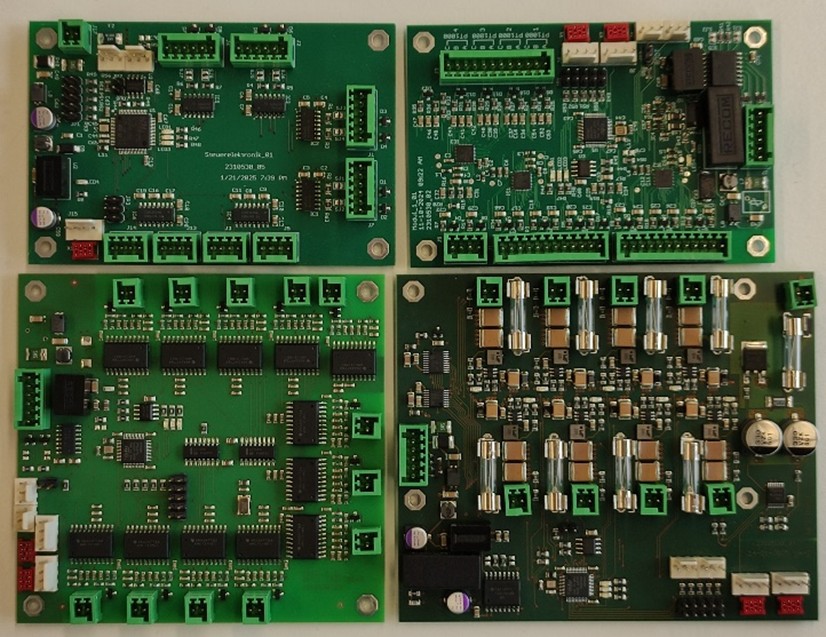
In P2 (the “development phase”), the new technology has been developed by a medium-size company (VBE Elektronik, Ettlingen, Germany), in close cooperation with the scientists (and later users) and by having various virtual and physical meetings over the complete development time of ~12 months. The frequent meetings and continuous assessment of interim development steps allowed continuous technology and knowledge transfer and guaranteed that the final product will perfectly fulfill all user needs, and this from the very beginning and not only after some time-consuming and costly redesigns. Moreover, a prototype version was integrated and tested in an IAGOS-CARIBIC ozone instrument (in the laboratory). Results were considered in a pre-final layout / design (see figure 2).
In P3 (the “verification / optimization phase”), the new technology is tested in the field and (if required) in reference laboratories and found shortcomings are considered by the industrial partner to further optimize its product and thus to make it even more attractive for all kind of consumers in the relevant field. In the actual case, potential buyers of the highly versatile and reasonably priced electronics are the infrastructures in the environmental domain (especially ACTRIS, ICOS and IAGOS), but also other research performing institutes and the private sector.
Achievements
The prototype electronics is shown in Figure 2 (right, status March 2025).
The new multi-function electronics can read
- 16 temperatures and
- 12 input voltages,
can control
- 16 output voltages,
can communicate
via 2 RS232 interfaces and can easily be configured and controlled (via USB) by all kind of computers. It is a factor of 20-30 cheaper and a factor of 6-10 smaller than more high-tech data acquisition and control systems e.g. by National Instruments. It is thus suitable and favorable for numerous applications with e.g. weight and size limitations such as on moving platforms (aircraft, balloon) or for medium-cost and medium-complex instruments.
Still, the system is perfectly suited for the fast (10 Hz) high-accuracy ozone instrument FAIRO operated in the IAGOS-CARIBIC laboratory and research aircraft HALO (Zahn et al., doi:10.5194/amt-5-363-2012), which houses two measurement techniques (UV photometry and chemiluminescence detection) working at the physical limit, that is, are quantum-noise limited.
Task 2.3. Pilot Case: “Scientific services – Atmosphere “(Led by University of Helsinki)
Baseline situation
Current air quality monitoring systems across Europe predominantly rely on fixed monitoring stations, which, while providing reliable long-term data, lack the spatial resolution necessary to characterize intra-urban variability or pollution hotspots. With the inclusion of ultrafine particle (UFP) number concentrations and Black Carbon (BC) in the revised European Air Quality Directive (EN 2024/2881), there is an emerging regulatory demand for innovative measurement strategies capable of capturing hyperlocal air pollution at the level of personal exposure.
Definition phase (P1)
A key scientific and observational gap was identified: the lack of mobile, high-resolution measurement systems capable of capturing UFP and BC concentrations across urban environments, particularly around air pollution hotspots and at street level. Recognizing that the fixed-site approach falls short in terms of spatial coverage and granularity, especially in dense urban areas, the pilot aimed to develop a solution that would address these limitations through mobile scientific services.
Development phase (P2)
To address the identified gap, a multi-stakeholder team was established, bringing together representatives from across the value chain:
1. A research group investigating spatial variability of air pollution (scientific community),
2. A hardware developer creating a new mobile UFP measurement system,
3. A software partner developing data workflows and pipelines,
4. Public authorities operating traditional air quality networks,
5. Air quality modelers (public service providers),
6. A private sector entity interested in mobile pollution mapping.
Initial analyses of existing infrastructure revealed that most monitoring systems fail to capture spatial heterogeneity. No comprehensive commercial solutions for mobile hyperlocal air quality mapping were found, aside from academic prototypes. A collaboration was initiated with a global environmental consultancy to define potential applications and business models for mobile data. The pilot launched through a joint strategic workshop to align technical capacities and development priorities.
Field tests commenced using existing low-cost sensors mounted on bicycles within the Helsinki metropolitan area. These early campaigns validated the feasibility of mobile measurements and informed subsequent modular sensor stack development. The platform design enabled phased instrumentation – allowing for iterative integration of additional measurement modules. Simultaneously, an online data pipeline and real-time cloud-based storage system were implemented, with custom algorithms developed for unbiased spatial averaging and visualization.
Verification / optimization phase (P3)
Figure 3a demonstrates the outcomes of the pilot measurements with averaged PM concentrations over 12 laps of a defined route in autumn 2024, with consistent elevation of PM levels observed at specific segments—attributed possibly to local resuspension or construction activity. The UFP particle number concentration data from a single measurement round in June 2025 (Figure 3b) highlights significant intra-route variability and clear spatial patterns associated with traffic density and land use (e.g., forested vs. junction areas).
The results were verified by evaluating the correspondence between modeled and observed hyperlocal UFP data. Due to their short atmospheric lifetimes and high spatial variability, UFPs are notoriously difficult to model. Figure 3c shows a case study comparing measured vs. modeled PN concentrations (April 2025), demonstrating promising agreement despite inherent uncertainties. These results pave the way for future integration of mobile measurements into real-time model calibration and online data assimilation workflows.
Achievements
This pilot successfully demonstrated a scalable scientific service concept for mobile, hyperlocal air quality monitoring using emerging pollutants (UFP, BC) as target parameters. The modular platform and cloud-based analytics pipeline provide a flexible architecture suitable for both scientific applications and policy-relevant decision-making support. The collaborative co-design with multiple stakeholders—including public authorities and private users—ensures a strong foundation for future commercialization and deployment in urban environments across Europe.
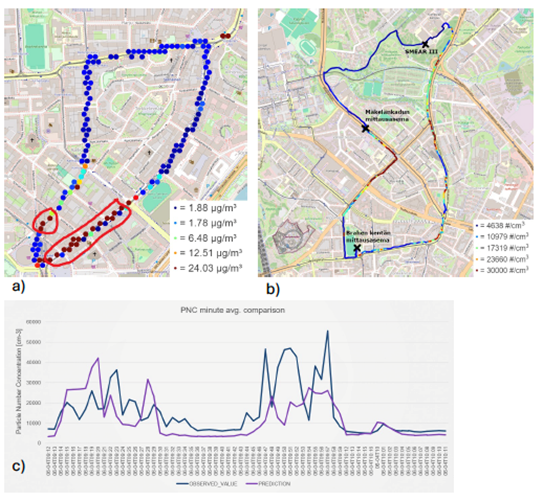
Figure 3. a) Averaged aerosol particle mass concentrations during multiple measurement cycles, b) UFP concentrations during a single round-trip, c) comparison of modelled and observed UFP concentrations.
Task 2.3. Pilot Case: “Scientific services – Biosphere, targeting the scientific community’s need for better estimates of environmental impacts of drought stress to ecosystem productivity” (Led by University of Helsinki)
Development of the technology
UAV-optical sensors Unlike the rather bulky gas exchange sensors, the flexibility offered by small and medium sized optical sensors allow them to be attached to remote sensing platforms, such as drones and other UAVs. Additionally, using the optical sensors in combination with gas exchange measurements allows for the gathering of training data for different species in varying growing conditions.
Baseline situation
Drought causes significant losses to agricultural production globally. This makes it important to develop novel technologies to map and measure the impacts of droughts on different agricultural products in varying species and growing conditions. While the gold standard of measuring plant and ecosystem productivity is leaf level gas exchange measurements, these measurements are slow and non- flexible to perform. To address these issues, plant drought stress measurements based on optical indicators, such as vegetation indices based on leaf reflectance and chlorophyll fluorescence have been developed. While not as accurate as gas exchange measurements, optical measurements are non-invasive, fast, flexible and allow for the measurement of large areas promptly and reliably. Currently, to perform exact measurements on the effect of abiotic stressors, such as drought, on ecosystem productivity, leaf level measurements gathered in-situ are still needed to supplement remote sensing data.
Achievements
During summer 2024 we initiated and carried out measurements concerning pilot case T2.3 #2, which targeted the scientific community’s need for better estimates of environmental impacts of drought to ecosystem productivity. For optical measurements we used both multispectral (DJI Mavic 3M) and thermal imaging drones (DJI Mavic 3T), as well as a hyperspectral imaging sensor (Senop HSC-2) and a prototype chlorophyll fluorescence sensor, For the gas exchange measurements, we used a Walz GFS-3000 gas exchange measurement system. Relevant measurements were conducted on annual and perennial species both in field and greenhouse conditions at the University of Helsinki Viikki campus area in cooperation with several research groups using both established and emerging technologies.

Figure 4. Drought measurements on the biodiversity test field from an UAV platform
Achievements
During summer 2024 we initiated and carried out measurements concerning pilot case T2.3 #2, which targeted the scientific community’s need for better estimates of environmental impacts of drought to ecosystem productivity. For optical measurements we used both multispectral (DJI Mavic 3M) and thermal imaging drones (DJI Mavic 3T), as well as a hyperspectral imaging sensor (Senop HSC-2) and a prototype chlorophyll fluorescence sensor, For the gas exchange measurements, we used a Walz GFS-3000 gas exchange measurement system. Relevant measurements were conducted on annual and perennial species both in field and greenhouse conditions at the University of Helsinki Viikki campus area in cooperation with several research groups using both established and emerging technologies.
Among these novel technologies being developed are the combination of modern UAV platforms and optical sensors based on leaf reflectance and chlorophyll fluorescence. Additionally, the aim of this pilot study was to assess the possibility of combining some of these novel technologies in the future, such as possibly integrating a newly developed low-cost fluorescence imaging sensor to a drone, thus combining both more established and emerging technologies.
This would allow for the determination of how these optical methods compare with leaf level gas exchange measurements in measuring the effects of drought on ecosystem productivity.Finally, the results from this pilot study aim to demonstrate the ability of combined thermal, hyperspectral and chlorophyll measurements, used in conjunction with more established technologies, to capture drought stress in a variety of species and pave the way for them as an established means to study plant abiotic stress in the future on both the leaf and canopy scales.
Task 2.4. Pilot Case: “Intra-RI Technological Development”: facilitating the development of interoperable/harmonized technologies by RIs and their effective transfer within ENVRIs“ (Led by UFZ)
The Cosmic-Ray Neutron Sensing method was developed in the early 2000s, drawing upon research findings in the fields of cosmic ray physics and hydrology, with the objective of creating a large-scale, real-time soil moisture monitoring tool. A significant benefit of CRNS is its capacity to measure soil moisture over a substantial area (hundreds of meters), thereby minimizing the requirement for multiple point sensors. In recent years, the method has undergone enormous development and has enormous potential to significantly improve the long-term recording of soil moisture in RIs in particular.
However, the interpretation of the measurement signal is challenging and complex, as it is dependent on various factors such as soil properties, vegetation, atmospheric conditions and cosmic radiation fluctuations. This complexity often hinders the harmonized and standardized establishment of the measurement method. The provision of a community-driven, ready-to-use, open-source data processing/visualization technology that represents the current state of knowledge is essential to establishing the CRNS measurement method across RIs of the Environment Domain. The pilot case selected here was dedicated to the community-driven development of such a tool designed to promote and facilitate intra-RI harmonization of the CRNS measurement method.
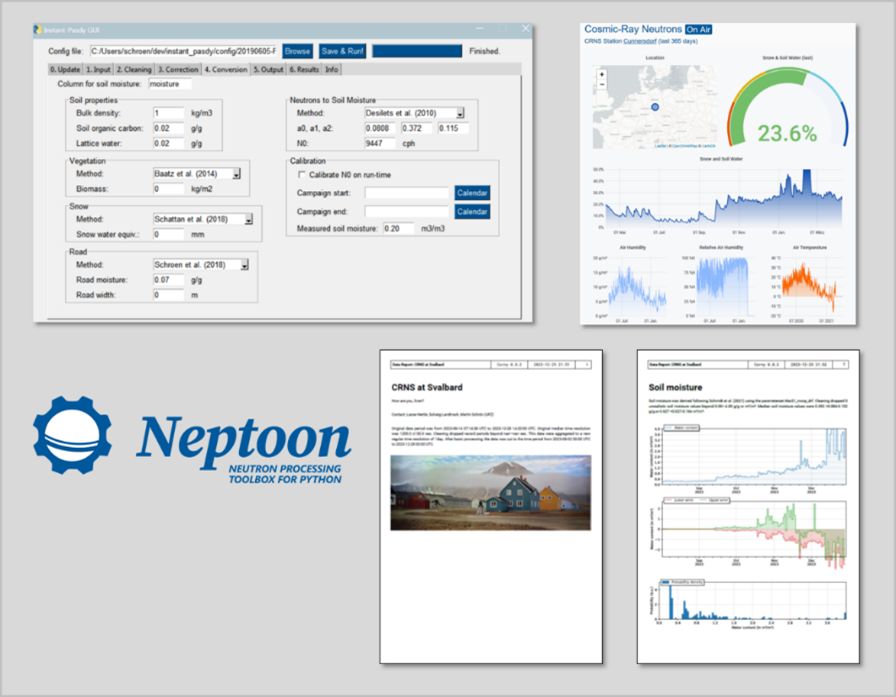
Figure 5. Screenshots of GUI of NEPTOON CRNS software, examples of visualizations and result reports produced with NEPTOON.
Step 1: Reviewing existing RI standards and interfaces: An inventory of RI standards used for soil moisture monitoring was conducted. Step 2: Identifying users and specifying user needs and technical requirements: The RI-specific requirements for a CRNS processing tool were specified following coordination between expert groups from eLTER and ICOS. Concurrently, the pilot study was presented to the international CRNS community and an initiative was launched to develop a global CRNS reference standard, which should form the basis for intra-RI harmonization. Furthermore, co-operations were established with some of the most important manufacturers of CRNS measuring devices as a basis for largely automated sensor-specific data processing. Step 3: Translating needs into solutions: Based on the identified requirements, a python tool for processing Cosmic-Ray Neutron Sensors (CRNS) was developed (neptoon.org) which enables both the easy processing of CRNS data and utilizes the most current state of knowledge. Finally, the prototype of the software was presented to the European and global RI community in a webinar and hands-on workshop.
 “Funded by the European Union. Views and opinions expressed are however those of the author(s) and do not necessarily reflect those of the European Union or REA. Neither the European Union, nor the granting authority can be held responsible for them.”
“Funded by the European Union. Views and opinions expressed are however those of the author(s) and do not necessarily reflect those of the European Union or REA. Neither the European Union, nor the granting authority can be held responsible for them.”